本文最后更新于:14 天前
ORB角点检测
【简介】
- ORB(Oriented FAST and Rotated BRIEF)是一种快速特征点提取和描述的算法。
- 这个算法是由Ethan Rublee, Vincent Rabaud, Kurt Konolige以及Gary R.Bradski在2011年一篇名为“ORB:An Efficient Alternative to SIFT or SURF”的文章中提出。
- ORB算法分为两部分,分别是特征点提取和特征点描述。特征提取是由FAST(Features from Accelerated Segment Test)算法发展来的,特征点描述是根据BRIEF(Binary Robust Independent Elementary Features)特征描述算法改进的。
- ORB = oFast + rBRIEF。据称ORB算法的速度是sift的100倍,是surf的10倍。
- ORB算子在SLAM及无人机视觉等领域得到广泛应用
【oFAST特征提取】
- ORB算法的特征提取是由FAST算法改进的,这里称为oFAST(FAST keypoint Orientation)。
- 在使用FAST提取出特征点之后,给其定义一个特征点方向,以此来实现特征点的旋转不变性。
粗提取
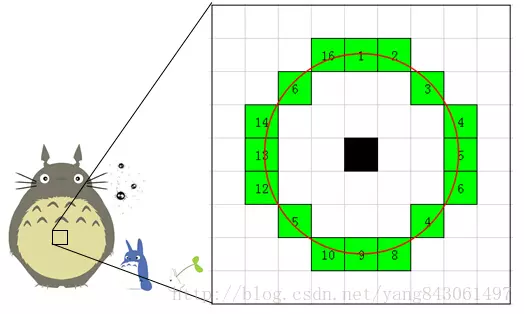
- 判断特征点:从图像中选取一点P,以P为圆心画一个半径为3像素的圆。圆周上如果有连续N个像素点的灰度值比P点的灰度值大戒小,则认为P为特征点。这就是大家经常说的FAST-N。有FAST-9、FAST-10、FAST-11、FAST-12,大家使用比较多的是FAST-9和FAST-12。
- 快速算法:为了加快特征点的提取,快速排出非特征点,首先检测1、5、9、13位置上的灰度值,如果P是特征点,那么这四个位置上有3个或3个以上的的像素值都大于或者小于P点的灰度值。如果不满足,则直接排出此点。
筛选最优特征点
机器学习的方法筛选最优特征点。简单来说就是使用ID3算法训练一个决策树,将特征点圆周上的16个像素输入决策树中,以此来筛选出最优的FAST特征点。具体步骤如下:
- 选取进行角点提取的应用场景下的一组训练图像。
- 使用FAST角点检测算法找出训练图像上的所有角点。
- 对于每一个角点,将其周围的16个像素存储成一个向量。对所有图像都这样做构建一个特征向量。
- 每一个角点的16像素点都属于下列三类中的一种,像素点因此被分成三个子集:$P_d、P_s、P_b$
- 定义一个新的布尔变量Kp ,如果是角点就设置为True,否则就设置为False。
- 使用ID3算法来查询每一个子集。
- 递归计算所有的子集直到它的熵为0。
注意:被构建好的决策树可用于其它图像的FAST检测。
使用非极大值抑制算法去除临近位置多个特征点
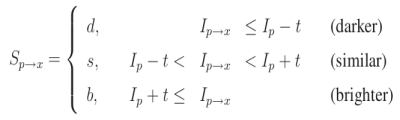
- 计算特征点出的FAST得分值s(像素点不周围16个像素点差值的绝对值之和)
- 以特征点p为中心的一个邻域(如3x3或5x5)内,若有多个特征点,则判断每个特征点的s值
- 若p是邻域所有特征点中响应值最大的,则保留;否则,抑制。若邻域内只有一个特征点,则保留。得分计算公式如下(公式中用V表示得分,t表示阈值):

建立金字塔以实现特征点多尺度不变性
- 设置一个比例因子scaleFactor(opencv默认为1.2)和金字塔的层数nlevels(Opencv默认为8)。
- 将原图像按比例因子缩小成nlevels幅图像。
- 缩放后的图像为:I’= I/scaleFactork(k=1,2,…, nlevels)。nlevels幅不同比例的图像提取特征点总和作为这幅图像的oFAST特征点。
- 特征点的旋转不变性。ORB算法提出使用矩(moment)法来确定FAST特征点的方向。也就是说通过矩来计算特征点以r为半径范围内的质心,特征点坐标到质心形成一个向量作为该特征点的方向。矩定义如下:$m_{pq}=\Sigma_{x,y} x^p y^q I(x,y), x,y \in [-r,r]$
- 其中,I(x,y)为图像灰度表达式。该矩的质心为:$C = ( \dfrac{m_{10}}{m_{00}}, \dfrac{m_{01}}{m_{00}})$
- 假设角点坐标为O,则向量的角度即为该特征点的方向。计算公式如下:$\theta = arctan(m_{01}/m_{10})$
算法特点
- FAST算法比其他角点检测算法要快
- 受图像噪声以及设定阈值影响较大
- 当设置n<12n<12时,不能用快速方法过滤非角点
- FAST不产生多尺度特征,不具备旋转不变性,而且检测到的角点不是最优
【rBRIEF】
ORB算法的特征描述是由BRIEF算法改进的,这里称为rBRIEF(Rotation-Aware Brief)。也就是说,在BRIEF特征描述的基础上加入旋转因子从而改进BRIEF算法。
算法描述
得到特征点后我们需要以某种方式描述这些特征点的属性。这些属性的输出我们称之为该特征点的描述子(Feature Descritors).ORB采用BRIEF算法来计算一个特征点的描述子。BRIEF算法的核心思想是在关键点P的周围以一定模式选取N个点对,把这N个点对的比较结果组合起来作为描述子。
- BRIEF算法计算出来的是一个二进制串的特征描述符。它是在一个特征点的邻域内,选择n对像素点$p_i、q_i(i=1,2,…,n)$。
- 比较每个点对的灰度值的大小,如果$I(p_i)> I(q_i)$,则生成二进制串中的1,否则为0。
- 所有的点对都进行比较,则生成长度为n的二进制串。一般n取128、256戒512,opencv默认为256。
算法步骤
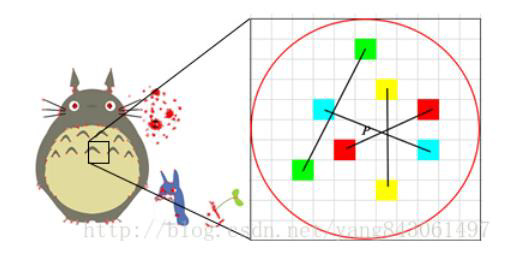
- 以关键点P为圆心,以d为半径做圆O。
- 在圆O内某一模式选取N个点对。这里为方便说明,N=4,实际应用中N可以取512.
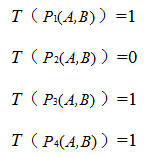
假设当前选取的4个点对如上图所示分别标记为:
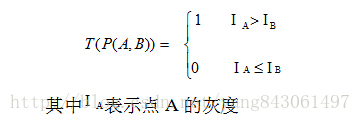
- 定义T:
- 分别对已选取的点对进行T操作,将得到的结果进行组合。
- 则最终的描述子为:1011

具有旋转不变性的BRIEF
ORB并没有解决尺度一致性问题,在OpenCV的ORB实现中采用了图像金字塔来改善这方面的性能。ORB主要解决BRIEF描述子不具备旋转不变性的问题。
steered BRIEF(旋转不变性改进)
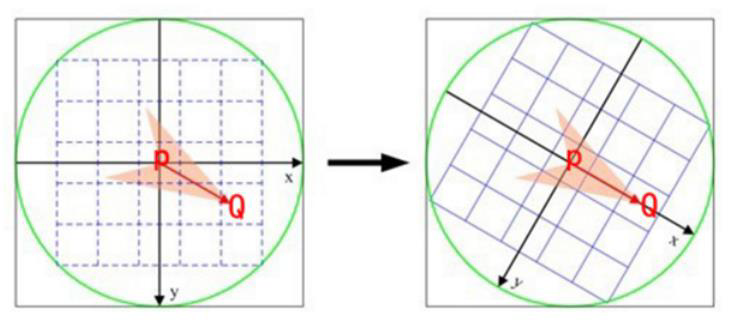
- 在使用oFast算法计算出的特征点中包括了特征点的方向角度。假设原始的BRIEF算法在特征点SxS(一般S取31)邻域内选取n对点集。
- 经过旋转角度θ旋转,得到新的点对$D_\theta=R_\theta D$
- 在新的点集位置上比较点对的大小形成二进制串的描述符。
描述子的区分性
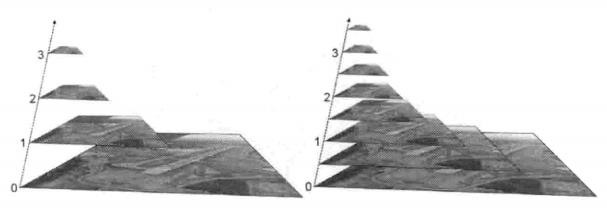
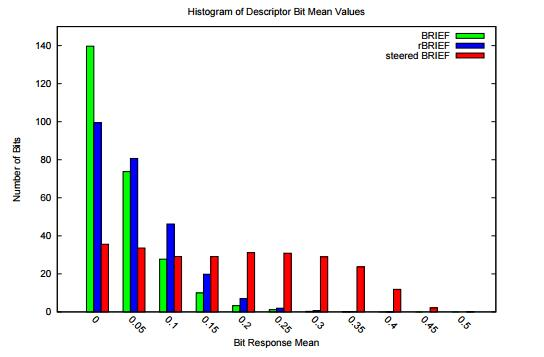
通过上述方法得到的特征描述子具有旋转不变性,称为steered BRIEF(sBRIEF),但匹配效果却不如原始BRIEF算法,因为可区分性减弱了。特征描述子的一个要求就是要尽可能地表达特征点的独特性,便于区分不同的特征点。如下图所示,为几种特征描述子的均值分布,横轴为均值与0.5之间的距离,纵轴为相应均值下特征点的统计数量。可以看出,BRIEF描述子所有比特位的均值接近于0.5,且方差很大;方差越大表明可区分性越好。不同特征点的描述子表现出较大的差异性,不易造成无匹配。但steered BRIEF进行了坐标旋转,损失了这个特性,导致可区分性减弱,相关性变强,不利于匹配。
为了解决steered BRIEF可区分性降低的问题,ORB使用了一种基于学习的方法来选择一定数量的随机点对。
- 首先建立一个大约300k特征点的数据集(特征点来源于PASCAL2006中的图像),对每个特征点,考虑其31×31的邻域Patch,为了去除噪声的干扰,选择5×5的子窗口的灰度均值代替单个像素的灰度,这样每个Patch内就有N=(31−5+1)×(31−5+1)=27×27=729个子窗口,从中随机选取2个非重复的子窗口,一共有$M=C_N^2$中方法。
- 这样,每个特征点便可提取出一个长度为M的二进制串,所有特征点可构成一个300k×M的二进制矩阵Q,矩阵中每个元素取值为0或1。现在需要从M个点对中选取256个
相关性最小、可区分性最大的点对,作为最终的二进制编码。筛选方法如下:
- 对矩阵Q的每一列求取均值,并根据均值与0.5之间的距离从小到大的顺序,依次对所有列向量进行重新排序,得到矩阵T
- 将T中的第一列向量放到结果矩阵R中
- 取出T中的下一列向量,计算其与矩阵R中所有列向量的相关性,如果相关系数小于给定阈值,则将T中的该列向量移至矩阵R中,否则丢弃
- 循环执行上一步,直到R中有256个列向量;如果遍历T中所有列,R中向量列数还不满256,则增大阈值,重复以上步骤。
这样,最后得到的就是相关性最小的256对随机点,该方法称为rBRIEF。
【总结】
- ORB = oFAST + rBRIEF
- oFAST是一类快速角点检测算法,并具备旋转不变性
- rBRIEF是一类角点描述(编码算法),并且编码具有良好的可区分性
代码实例
#!/usr/bin/env python
# -*- coding: utf-8 -*-
# @Time : 2019/1/19 13:30
# @Author : Seven
# @File : ORBDemo.py
# @Software: PyCharm
import cv2
import numpy as np
img1 = cv2.imread('csdn.png')
img2 = np.rot90(img1)
orb = cv2.ORB_create(50)
# 特征点检测和提取特征点描述子
kp1, des1 = orb.detectAndCompute(img1, None)
kp2, des2 = orb.detectAndCompute(img2, None)
# 创建 BFMatcher 对象
bf = cv2.BFMatcher(cv2.NORM_L2)
# 根据描述子匹配特征点.
matches = bf.match(des1, des2)
# 画出50个匹配点
img3 = cv2.drawMatches(img1, kp1, img2, kp2, matches[:50], None, flags=2)
cv2.imshow("ORB", img3)
cv2.waitKey(0)
本博客所有文章除特别声明外,均采用 CC BY-SA 3.0协议 。转载请注明出处!