本文最后更新于:14 天前
基本思想
边缘检测的基本思想是通过检测每个像素和其邻域的状态,以决定该像素是否位于一个物体的边界上。如果一个像素位于一个物体的边界上,则其邻域像素的灰度值的变化就比较大。假如可以应用某种算法检测出这种变化并进行量化表示,那么就可以确定物体的边界。
- 边缘检测的实质是微分。
- 实际中常用差分, X方向、Y方向。
基本算子
【Robert算子:一阶微分算子】
对于图像来说,是一个二维的离散型数集,通过推广二维连续型求函数偏导的方法,来求得图像的偏导数,即在(x,y)处的最大变化率,也就是这里的梯度:
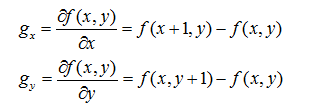
梯度是一个矢量,则(x,y)处的梯度表示为:

其大小为:

因为平方和平方根需要大量的计算开销,所以使用绝对值来近似梯度幅值:

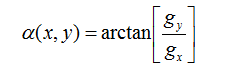
方向与α(x,y)正交:
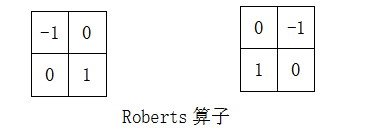
其对应的模板为:
图像的垂直和水平梯度

我们有时候也需要对角线方向的梯度,定义如下:

对应模板为:
Roberts 交叉梯度算子。
模板推导
垂直或水平算子模板

交叉算子模板
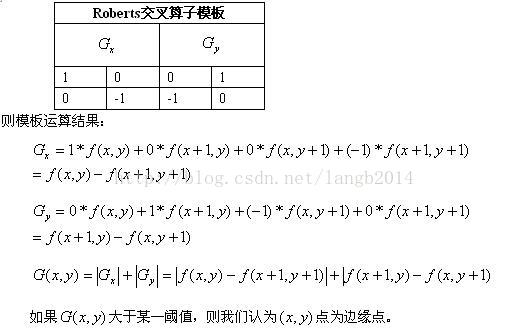
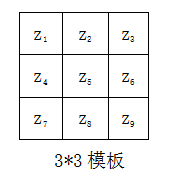
2*2 大小的模板在概念上很简单,但是他们对于用关于中心点对称的模板来计算边缘方向不是很有用,其最小模板大小为3*3。3*3 模板考虑了中心点对段数据的性质,并携带有关于边缘方向的更多信息。
【Prewitt算子:一阶微分算子】
prewitt算子一般使用的是3*3的模板
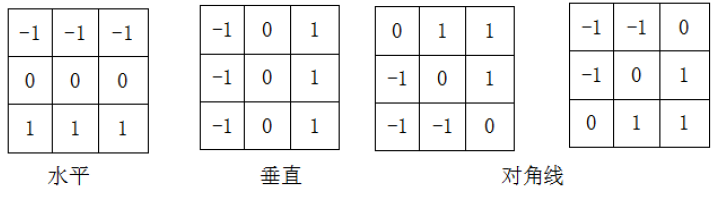
我如下定义水平、垂直和两对角线方向的梯度:

Prewitt算子:
数学推导:

Prewitt 算子是由两部分组成,检测水平边缘的模板和检测垂直边缘的模板, Prewitt 算子一个方向求微分,一个方向求平均,所以对噪声相对不敏感。
【Sobel算子:一阶微分算子】
Sobel 算子是在Prewitt算子的基础上改进的, 在中心系数上使用一个权值2, 相比较Prewitt算子,Sobel模板能够较好的抑制(平滑)噪声。
计算公式:
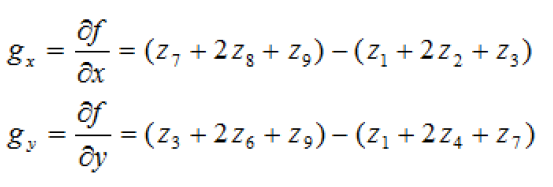
sobel算子:
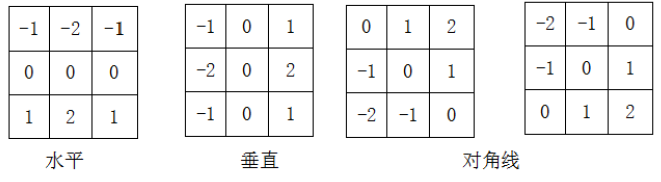
数学推导:


- sobel算子也有两个,一个是检测水平边缘的模板基于sobel算子的边缘检测,另一个是检测垂直边缘的模板基于sobel算子的边缘检测。
- 与Prewitt算子相比,sobel算子对于像素位置的影响做了加权,因此效果更好。
- sobel算子的另外一种形式是各向同性Sobel算子, 也有两个模板组成,一个是检测水平边缘的基于sobel算子的边缘检测,另一个是检测垂直边缘的基于sobel算子的边缘检测。
- 各向同性Sobel算子和普通sobel算子相比,位置加权系数更为准确,在检测不同方向的边缘是梯度的幅度是一致的。
【Laplace算子:二阶微分算子】
Laplace 算子是一种各向同性算子,在只关心边缘的位置而不考虑其周围的像素灰度差值时比较合适。Laplace算子对孤立像素的响应要比对边缘或线的响应要更强烈, 因此只适合用于
无噪声图像。存在噪声情况下, 使用Laplace算子检测边缘之前需要先进行低通滤波。
一阶导数:
二阶导数:
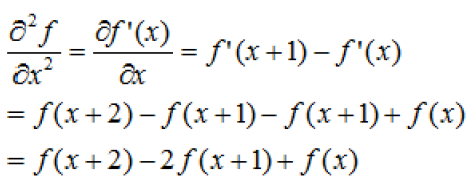
我们需要注意的是关于点x的二阶导数,故将上式中的变量减去1后,得到:

在图像处理中通过拉普拉斯模板求二阶导数, 其定义如下:

写成差分形式为

laplace卷积核:

在用lapacian 算子图像进行卷积运算时,当响应的绝对值超过指定阈值时,那么该点就是被检测出来的孤立点,具体输出如下:

【LoG算子:二阶微分算子】
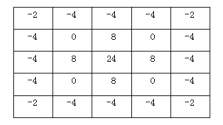
Log 边缘检测则是先进行高斯滤波再进行拉普拉斯算子检测, 然后找过零点来确定边缘位置,很多时候我们只是知道Log 5*5 模板如上图所示。
二维高斯公式:
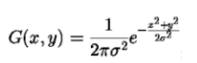
按拉普拉斯算子公式求X,Y方向的二阶偏导后:

这里x,y 不能看成模板位置,应看成是模板其他位置到中心位置的距离。那么写成:

这里x0,y0 就是模板中心位置,x,y 是模板其他位置,对于5*5 模板, 则$x_0,=2 , y_0=2$,那对于模板中(0,0)位置的权值,即把x= 0,y= 0,x0= 2,y0 = 2 带入上式, 令σ= 1,得到约等于0.0175,这样得到

通过取整变符号,且模板总和为0,得到下图所示的模板。

通常高斯分布中,在(-3σ,3σ)的范围内就覆盖了绝大部分区域,所以模板大小一般取dim = 1 + 6σ(在SIFT 特征中,其中的高斯模糊也是这样取),dim 如果为小数,则取不小于dim 的最小整数,当然实际使用时没有这么严格,如上面我们取σ=1 时,模板大小取5*5。那同一个尺寸的模板中的权值调整就是σ的变化得到的,变化到一定程度,模板尺寸大小改变。
Canny算子:非微分算子
【基本原理】
- 图象边缘检测必须满足两个条件:
- 能有效的抑制噪声。
- 必须尽量精确确定边缘的位置。
- 根据对信噪比与定位乘积进行测度,,得到最优化逼近算子。这就是Canny边缘检测算子。
- 类似与LoG边缘检测方法,也属于先平滑后求导数的方法。
【算法步骤】
- 使用高斯滤波器,以平滑图像,滤除噪声。
- 计算图像中每个像素点的梯度强度和方向。
- 应用非极大值(Non-Maximum Suppression)抑制, 以消除边缘检测带着的杂散响应。
- 应用双阈值(Double-Threshold)检测来确定真实的和潜在的边缘。
- 通过抑制孤立的弱边缘最终完成边缘检测。
第一步:同时平滑与微分

使用高斯函数的一阶导数同时完成平滑和微分。
第二步:计算梯度和方向

- 梯度幅值和方向

- 方向离散化:离散化为上下左右和斜45°共4个方向

第三步:梯度幅值非极大值抑制
细化梯度幅值图像中的屋脊带,只保留幅值局部变化最大的点
使用一个3*3邻域作用于幅值阵列的所有点。在每一点上, 邻域的中心像素与沿梯度方向的两个梯度幅值的插值结果进行较,仅保留极大值点

第四步:边缘连接
对上一步得到的图像使用低、高阈值t1, t2 阈值化,得到三幅图像

- T1对应假边缘,去除
- T3对应真边缘,全部保留
- T2连接:临接像素中是否有属于T3的像素
第五步:抑制孤立低阈值点

边缘检测总结
- 边缘检测即图像差分
- 常见边缘检测算子包括Robert算子,Sobel算子,LoG算子等,其中Sobel算子最为常用
- Canny算子的基本优点在于检测准确、对噪声稳健,在实际中广泛应用.
代码演示
import cv2
import numpy as np
# 加载图片
image = cv2.imread('lena.jpg')
img = cv2.pyrDown(image)
cv2.imshow("source image", img)
def RobertImage(img, name):
"""
robert算子的实现
:param img:
:param name:
:return:
"""
r_sunnzi = np.array([[-1, 1], [1, -1]], np.float32)
robertImage = cv2.filter2D(img, -1, r_sunnzi)
cv2.imshow("Robert-%s" % name, robertImage)
def sobelImage(img, name):
"""
Sobel算子
Sobel(src, ddepth, dx, dy, dst=None, ksize=None, scale=None, delta=None, borderType=None)
前四个是必须的参数:
第一个参数是需要处理的图像;
第二个参数是图像的深度,-1表示采用的是与原图像相同的深度。目标图像的深度必须大于等于原图像的深度;
dx和dy表示的是求导的阶数,0表示这个方向上没有求导,一般为0、1、2。
其后是可选的参数:
dst不用解释了;
ksize是Sobel算子的大小,必须为1、3、5、7。
scale是缩放导数的比例常数,默认情况下没有伸缩系数;
delta是一个可选的增量,将会加到最终的dst中,同样,默认情况下没有额外的值加到dst中;
borderType是判断图像边界的模式。这个参数默认值为cv2.BORDER_DEFAULT。
:param img: 图片数据
:param name: 命名标志
:return:
"""
# 先检测xy方向上的边缘
Sobel_Ex = cv2.Sobel(src=img, ddepth=cv2.CV_16S, dx=1, dy=0, ksize=3)
Sobel_Ey = cv2.Sobel(src=img, ddepth=cv2.CV_16S, dx=0, dy=1, ksize=3)
# 即Sobel函数求完导数后会有负值,还有会大于255的值。而原图像是uint8,即8位无符号数,
# 所以Sobel建立的图像位数不够,会有截断。因此要使用16位有符号的数据类型,即cv2.CV_16S。
# cv2.imshow("Sobel_Ex-%s" % name, Sobel_Ex)
# 图像的每一个像素的横向及纵向梯度近似值结合
# 用convertScaleAbs()函数将其转回原来的uint8形式。否则将无法显示图像,而只是一副灰色的窗口。
absX = cv2.convertScaleAbs(Sobel_Ex)
absY = cv2.convertScaleAbs(Sobel_Ey)
# cv2.imshow("absX-%s" % name, absX)
# cv2.imshow("absY-%s" % name, absY)
SobelImage = cv2.addWeighted(absX, 0.5, absY, 0.5, 0)
cv2.imshow("sobel-%s" % name, SobelImage)
# ddepth=-1表示图像深度和原图深度一致
# Ex = cv2.Sobel(img, -1, 1, 0, ksize=3)
# Ey = cv2.Sobel(img, -1, 0, 1, ksize=3)
# # cv2.imshow("Ex-%s" % name, Ex)
# SobelImg = cv2.addWeighted(Ex, 0.5, Ey, 0.5, 0)
# cv2.imshow("soImg-%s" % name, SobelImg)
def LaplaceImage(img, name):
"""
Laplace算子
Laplacian(src, ddepth, dst=None, ksize=None, scale=None, delta=None, borderType=None)
前两个是必须的参数:
第一个参数是需要处理的图像;
第二个参数是图像的深度,-1表示采用的是与原图像相同的深度。目标图像的深度必须大于等于原图像的深度;
其后是可选的参数:
dst不用解释了;
ksize是算子的大小,必须为1、3、5、7。默认为1。
scale是缩放导数的比例常数,默认情况下没有伸缩系数;
delta是一个可选的增量,将会加到最终的dst中,同样,默认情况下没有额外的值加到dst中;
borderType是判断图像边界的模式。这个参数默认值为cv2.BORDER_DEFAULT。
:param img: 图片数据
:param name: 命名标志
:return:
"""
# ddepth=-1表示图像深度和原图深度一致
# laplaceImage = cv2.Laplacian(img, ddepth=-1, ksize=3)
# cv2.imshow("laplace-%s" % name, laplaceImage)
# ddepth=cv2.CV_16S表示图像深度
laplaceImg = cv2.Laplacian(img, ddepth=cv2.CV_16S, ksize=3)
lapimg = cv2.convertScaleAbs(laplaceImg)
cv2.imshow("laplace-%s" % name, lapimg)
def LoG(img, name):
"""
LoG算子的实现
:param img:
:param name:
:return:
"""
gaussImage = cv2.GaussianBlur(img, (5, 5), 0.01)
laplaceImg = cv2.Laplacian(gaussImage, ddepth=cv2.CV_16S, ksize=3)
logImg = cv2.convertScaleAbs(laplaceImg)
cv2.imshow("LoG-%s" % name, logImg)
def CannyImage(img, name):
"""
必要参数:
第一个参数是需要处理的原图像,该图像必须为单通道的灰度图;
第二个参数是阈值1;
第三个参数是阈值2。
其中较大的阈值2用于检测图像中明显的边缘,但一般情况下检测的效果不会那么完美,
边缘检测出来是断断续续的。所以这时候用较小的第一个阈值用于将这些间断的边缘连接起来。
:param img: 图片数据
:param name: 命名标志
:return:
"""
# 先进行高斯平滑
gaussImage = cv2.GaussianBlur(img, (3, 3), 0)
# 边缘检测,最大阈值为150,最小阈值为50
# Canny 推荐的 高:低 阈值比在 2:1 到3:1之间。
cannyImage = cv2.Canny(gaussImage, 50, 150)
cv2.imshow("canny-%s" % name, cannyImage)
# 彩色图像进行Robert边缘检测
RobertImage(img, 'rgb')
# 灰度图像进行robert边缘检测
grayImage = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
RobertImage(grayImage, 'gray')
# 彩色图像进行sobel边缘检测
sobelImage(img, 'rgb')
# 灰度图像进行sobel边缘检测
grayImage = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
sobelImage(grayImage, 'gray')
# 彩色图像进行laplace边缘检测
LaplaceImage(img, 'rgb')
# 灰度图像进行laplace边缘检测
grayImage = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
LaplaceImage(grayImage, 'gray')
# 彩色图像进行LoG边缘检测
LoG(img, 'rgb')
# 灰度图像进行LoG边缘检测
grayImage = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
LoG(grayImage, 'gray')
# 彩色图像进行canny边缘检测
CannyImage(img, 'rgb')
# 灰度图像进行canny边缘检测
grayImage = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
CannyImage(grayImage, 'gray')
cv2.waitKey(0)
- sobel 产生的边缘有强弱,抗噪性好
- laplace 对边缘敏感,可能有些是噪声的边缘,也被算进来了
- canny 产生的边缘很细,可能就一个像素那么细,没有强弱之分。
本博客所有文章除特别声明外,均采用 CC BY-SA 3.0协议 。转载请注明出处!