本文最后更新于:14 天前
坐标变换与摄像机模型
图像变换模型
【平移变换】
只改变图形位置,不改变图形的大小和形状.

代码及演示
import cv2
import numpy as np
# 加载图片
source_image = cv2.imread('lena.jpg', 0)
cv2.imshow('source', source_image)
# 平移图片
rows, cols = source_image.shape
# 创建交换矩阵,按(100,50)平移
M = np.float32([[1, 0, 100], [0, 1, 50]])
# 使用仿射变换的api进行平移变换
translation_image = cv2.warpAffine(source_image, M, (cols, rows))
cv2.imshow('translation', translation_image)
cv2.waitKey(0)
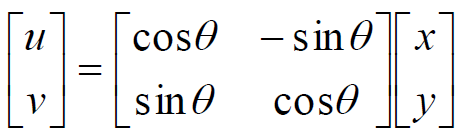
【旋转变换】
将输入图像绕笛卡尔坐标系的原点逆时针旋转$\theta$角度, 则变换后图像坐标为
代码及演示
import cv2
import numpy as np
# 加载图片
source_image = cv2.imread('lena.jpg', 0)
cv2.imshow('source', source_image)
# 获取形状
rows, cols = source_image.shape
# 旋转图片
# 创建交换矩阵, 旋转90度
M = cv2.getRotationMatrix2D(((cols-1)/2., (rows-1)/2.), 90, 1)
# 使用仿射变换的api进行旋转变换
rotation_image = cv2.warpAffine(source_image, M, (cols, rows))
cv2.imshow('rotation', rotation_image)
cv2.waitKey(0)
【比例变换】
若图像坐标$(x, y)$ 缩放到$(S_x, S_y)$倍,则变换函数为:
其中$S_y$, 分别为 x和y 坐标的缩放因子,其大于1表示放大,小于1表示缩小。

代码及演示
import cv2
import numpy as np
# 加载图片
source_image = cv2.imread('lena.jpg', 0)
cv2.imshow('source', source_image)
# 获取形状
rows, cols = source_image.shape
# 比例变换
# 缩小一半
proportion_image = cv2.resize(source_image, (cols//2, rows//2), cv2.INTER_CUBIC)
cv2.imshow('proportion', proportion_image)
cv2.waitKey(0)
【仿射变换】
简单的来说就是一个
线性变换加上平移仿射变换的一般表达式为:
平移、比例缩放和旋转变换都是一种称为仿射变换的特殊情况。

仿射变换的性质

- 仿射变换有6个自由度(对应变换中的6个系数),因此,仿射变换后互相平行直线仍然为平行直线,三角形映射后仍是三角形。但却不能保证将四边形以上的多边形映射为等边数的多边形。
- 仿射变换,可以保持原来的线共点,点共线的关系不变,保持原来相互平行的的先仍然相互平行,保持原来在一直线上几段线段之间的比例 关系不变。但是,仿射变换不能保持原来的线段长度不变,也不能保持原来的夹角角度不变。
- 仿射变换的乘积和逆变换仍是仿射变换。
- 仿射变换能够实现平移、旋转、缩放等几何变换。
代码及演示
import cv2
import numpy as np
import matplotlib.pyplot as plt
# 加载图片
source_image = cv2.imread('lena.jpg', 0)
cv2.imshow('source', source_image)
# 获取形状
rows, cols = source_image.shape
# 仿射变换
# 定义交换矩阵
pts1 = np.float32([[50, 50], [200, 50], [50, 200]])
pts2 = np.float32([[10, 100], [200, 50], [100, 250]])
M = cv2.getAffineTransform(pts1, pts2)
# 开始变换
affine_image = cv2.warpAffine(source_image, M, (cols, rows))
plt.subplot(121), plt.imshow(source_image), plt.title('Input')
plt.subplot(122), plt.imshow(affine_image), plt.title('Output')
plt.show()
cv2.imshow('affine', affine_image)
cv2.waitKey(0)
【透视变换】
- 把物体的三维图像表示转变为二维表示的过程,称为透视变换,也称为投影映射,其表达式为:
- 透视变换也是一种平面映射 ,并且可以保证任意方向上的直线经过透视变换后仍然保持是直线。
- 透视变换具有9个自由度(其变换系数为9个),故可以实现平面四边形到四边形的映射。

透视变化示意

对于透视投影,一束平行于投影面的平行线的投影可保持平行,而不平行于投影面的平行线的投影会聚集到一个点,该点称
灭点.
代码及演示
import cv2
import numpy as np
import matplotlib.pyplot as plt
# 加载图片
source_image = cv2.imread('lena.jpg', 0)
cv2.imshow('source', source_image)
# 获取形状
rows, cols = source_image.shape
# 透视变换
# 定义交换矩阵
pts1 = np.float32([[56, 65], [368, 52], [28, 387], [389, 390]])
pts2 = np.float32([[0, 0], [300, 0], [0, 300], [300, 300]])
M = cv2.getPerspectiveTransform(pts1, pts2)
# 开始变换
perspective_image = cv2.warpPerspective(source_image, M, (300, 300))
plt.subplot(121), plt.imshow(source_image), plt.title('Input')
plt.subplot(122), plt.imshow(perspective_image), plt.title('Output')
plt.show()
cv2.imshow('perspective', proportion_image)
cv2.waitKey(0)
坐标系和坐标变换
不同坐标系及坐标变换关系
当物体旋转时,其上的点在固定坐标系坐标值变化。
任意两个三维坐标系之间的变换关系

注意:R满足旋转矩阵正交性约束
坐标系变换及旋转矩阵生成示意图

【像素坐标系】

像素坐标系uov是一个二维直角坐标系,反映了相机CCD/CMOS芯片中像素的排列情况。原点o位于图像的左上角,u轴、v轴分别于像面的两边平行。像素坐标系中坐标轴的单位是像素(整数)。
【图像坐标系】

图像坐标系(x,y):像素坐标系不利于坐标变换,因此需要建立图像坐标系XOY,其坐标轴的单位通常为毫米(mm),原点是相机光轴与相面的交点(称为主点),即图像的中心点,X轴、Y轴分别与u轴、v轴平行。故两个坐标系实际是平移关系,即可以通过平移就可得到。
【摄像机坐标系】
相机坐标系(camera coordinate)($O_cX_cY_cZ_c (camera frame)$),也是一个三维直角坐标系,原点位于镜头光心处,x、y轴分别与相面的两边平行,z轴为镜头光轴,与像平面垂直。
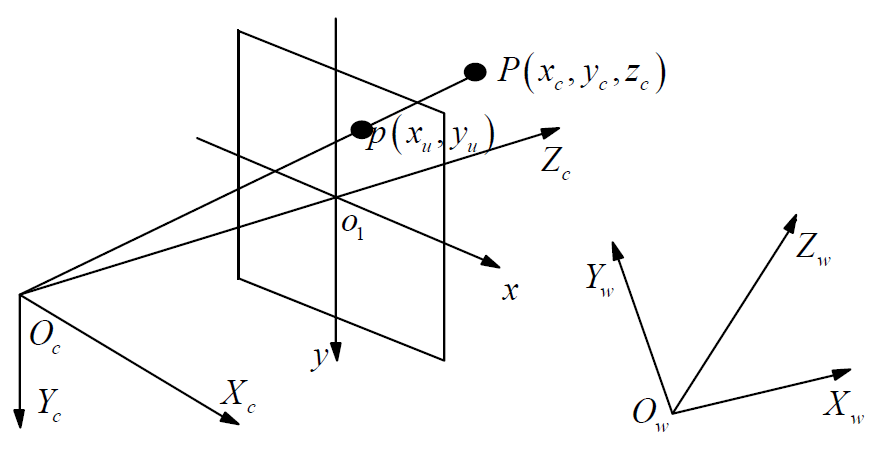
【世界坐标系】
世界坐标系(world coordinate)($O_wX_wY_wZ_w$),也称为测量坐标系,是一个三维直角坐标系,以其为基准可以描述相机和待测物体的空间位置。世界坐标系的位置可以根据实际情况自由确定。
【手端坐标系或平台坐标系】
$O_eX_eY_eZ_e$
【目标坐标系】
$O_tX_tY_tZ_t$
【坐标系转换】
世界坐标系转换为相机坐标系
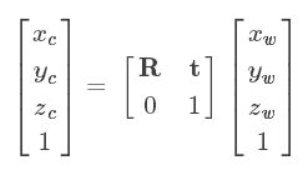
其中R为3*3的旋转矩阵,t为3*1的平移矢量,即相机外参数
相机坐标系转换为图像坐标系
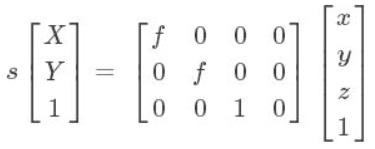
s为比例因子(s不为0),f为有效焦距(光心到图像平面的距离),(x,y,z,1)是空间点P在相机坐标系oxyz中的齐次坐标,(X,Y,1)是像点p在图像坐标系OXY中的齐次坐标。
图像坐标系转换为像素坐标系

其中,dX、dY分别为像素在X、Y轴方向上的物理尺寸,$u_0,v_0$为主点(图像原点)坐标
世界坐标系转换为像素坐标系

其中,$m_1、m_2$即为相机的内参和外参数。
注意:R,t参数矩阵为不可逆矩阵。
线性及非线性摄像机模型
【线性摄像机模型】
考虑简化的针孔模型
针孔模型是各种相机模型中最简单的一种,它是相机的一个近似线性模型。在相机坐标系下,任一点$P(X_c,Y_c,Z_c)$在像平面的投影位置,也就是说,任一点$P(X_c,Y_c,Z_c)$的投影点p(x,y)都是OP(即光心(投影中心)与点$P(X_c,Y_c,Z_c)$的连线)与像平面的交点如下图。


加入相机坐标系与世界坐标系变换关系,得到


说明:上述公式中完成了从
世界坐标系到图像坐标系的转变,中间经过了相机坐标系的过度,$X_w$中的w表示world世界,单位为毫米,而u,v是的 单位为像素,即完成了从毫米——像素的转换。所以,为了得到空间物体的三维世界坐标,就必须有两个或更多的相机构成立体视觉系统模型才能实现。
成像畸变示意


【非线性摄像机模型】
在实际的成像过程中,考虑镜头的失真,一般都存在非线性畸变,所以线性模型不能准确描述成像几何关系。非线性畸可用下列公式描述:


径向畸变,离心畸变,薄棱镜畸变
通常只考虑径向畸变:

若考虑非线性畸变,则对相机标定时需要使用非线性优化算法。而有研究表明引入过多的非线性参入(如离心畸变和薄棱畸变)不仅不能提高精度,还会引起解的不稳定。一般情况下径向畸变就足以描述非线性畸变,所有本课题只是考虑径向畸变。则将式(2.9)中的径向畸变代入式(2.8)可得:

总结
- 图像变换包括平秱、旋转、仿射、透视变换等
- 常用的坐标系包括像素坐标系、相机坐标系、世界坐标系等,任一点在世界坐标系和相机坐标系中的坐标通过投影矩阵M相关联,M包含了内参数和外参数矩阵
- 一般相机成像存在非线性畸变,重点需要考虑径向畸变
本博客所有文章除特别声明外,均采用 CC BY-SA 3.0协议 。转载请注明出处!