本文最后更新于:14 天前
相机标定
【基本问题】
相机内外参数标定

- 计算$m_{ij}$的解
- 分解内、外参数
- 考虑非线性项
【Zhang方法】
Zhang方法:由张正友提出,OpenCV等广泛使用
- 特点:使用平面靶标摆多个pose(可未知)
- 标定步骤
- 对一个pose,计算单应矩阵(类似M矩阵)
- 有三个以上Pose,根据各单应矩阵计算线性相机参数;
- 使用非线性优化方法计算非线性参数
第一步:求解单应矩阵——基本方程
特点:使用平面靶标摆多个pose(可未知)

平面靶标有四个点或更多时,可求解H(差一比例因子)
第二步:求解单应矩阵——建立内参数方程

根据R约束

对应每一个pose,可得到上述两个方程
第三步:求解内参数——建立方程
令 $B=(b_{ij})=M_1^{-T}M_1^{-1}$
根据B对称,定义参数向量

第四步:求解参数——建立内参数方程

第五步:求解参数——内参数求解
当n>=3 时,可求解b

解为:

前式代入,可知:

进一步可确定$M_1$各参数
第六步:求解参数——外参数求解

系数

最后一步:非线性畸变参数求解
以已有解为初值,求解下式:

可使用Levenberg-Marquardt算法求解(原方法中只含径向畸变)
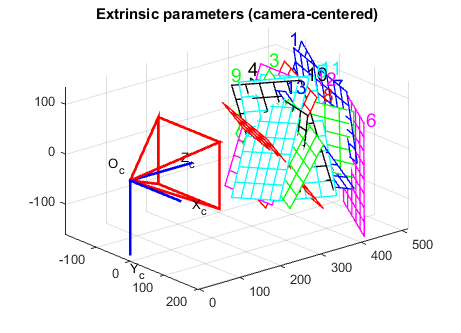
外参数标定结果示意
重投影示意

【总结】
- Zhang方法从多个角度拍摄平面标定物,进一步通过特征点计算内、外参数及非线性畸变
- 与已有方法相比,Zhang方法简单,不需要已知目标特征点三维坐标,因而得到广泛应用
- 注意:参与标定的数据一般为30张左右。
代码演示
#!/usr/bin/env python
# -*- coding: utf-8 -*-
# @Time : 2019/2/26 20:15
# @Author : Seven
# @File : CameraCalibration.py
# @Software: PyCharm
# function : 摄像机标定
import cv2
import numpy as np
import glob
# 设置寻找亚像素角点的参数,采用的停止准则是最大循环次数30和最大误差容限0.001
criteria = (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 30, 0.001)
# 准备目标点,例如 (0,0,0), (1,0,0), (2,0,0) ....,(6,5,0)
objp = np.zeros((6 * 7, 3), np.float32)
# 将世界坐标系建在标定板上,所有点的Z坐标全部为0,所以只需要赋值x和y
objp[:, :2] = np.mgrid[0:7, 0:6].T.reshape(-1, 2)
# 用于存储所有图像中的对象点和图像点的数组。
objpoints = [] # 存储在现实世界空间的3d点
imgpoints = [] # 储存图像平面中的2d点。
images = glob.glob('image/*.jpg')
for fname in images:
img = cv2.imread(fname)
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 获取XY坐标
size = gray.shape[::-1]
# 找到棋盘角点
ret, corners = cv2.findChessboardCorners(gray, (7, 6), None)
# 如果找到,添加3D点,2D点
if ret:
objpoints.append(objp)
# 增加角点的准确度
corners2 = cv2.cornerSubPix(gray, corners, (11, 11), (-1, -1), criteria)
imgpoints.append(corners2)
# 画出并显示角点
img = cv2.drawChessboardCorners(img, (7, 6), corners2, ret)
cv2.imshow('img', img)
cv2.waitKey(500)
# 相机标定
ret, mtx, dist, rvecs, tvecs = cv2.calibrateCamera(objpoints, imgpoints, size, None, None)
# 保存相机参数
np.savez('C.npz', mtx=mtx, dist=dist, rvecs=rvecs, tvecs=tvecs)
print("ret:", ret)
print("内参数矩阵:\n", mtx)
print("畸变系数:\n", dist)
print("旋转向量:", rvecs) # 外参数
print("平移向量:", tvecs) # 外参数运行结果:

本博客所有文章除特别声明外,均采用 CC BY-SA 3.0协议 。转载请注明出处!