本文最后更新于:14 天前
立体视觉
【基本概念】
我们在二维视角中,结构和深度是不确定的

立体视觉:第2个照相机可以解决这种歧义性,通过三角化实现深度测量

【平行双目视觉】
假设双目完全平行

空间点三维座标位置求解

视差和深度成反比关系: $z_1 = \frac{bf_x}{u_1-u_2}$

空间点三维座标位置求解:一般情况
- 二摄像机坐标系与世界坐标系位姿关系已知

- 共4个方程,三个未知数,可求解坐标
【三维重构】
三维重构步骤
- 提取特征点,建立特征匹配
- 计算视差
- 计算世界坐标
- 三角剖分
- 三维重构
提取特征点并建立匹配

特征匹配方式
- 特征点提取+特征匹配
- 光流匹配
- 块匹配
- 立体矫正+平行匹配
视差计算
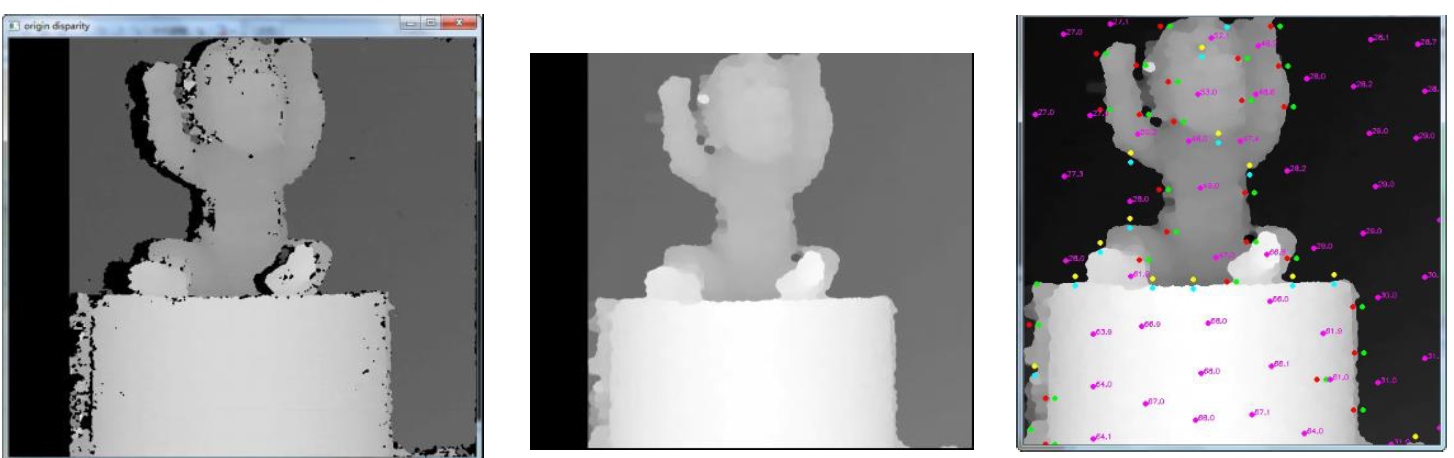
计算世界坐标–形成点云数据

三角剖分:采用经典的Delauney算法

Delauney算法示意:

Delaunay三角网是唯一的(任意四点不能共圆),在Delaunay三角形网中任一三角形的外接圆范围内不会有其它点存在。
三维重构:基于计算坐标,采用OpenGL绘制三角片

效果不好的主要原因,是图像中深度变化较大,同时灰度变换,而特征点选取的比较稀疏.
【总结】
- 立体视觉可计算空间点的三维坐标。基线越长,距离越近,精度越高
- 根据双目视觉进行三维重构包括特征点提取、匹配、坐标计算、三角剖分、三维重构等几个步骤
本博客所有文章除特别声明外,均采用 CC BY-SA 3.0协议 。转载请注明出处!