本文最后更新于:14 天前
卷积神经网络(Convolutional Neural Network, CNN)
卷积神经网络是近年来广泛应用于模式识别、图像处理等领域的一种高效识别算法,它具有结构简单、训练参数少和适应性强等特点。
卷积神经网络是一种前馈神经网络,它的人工神经元可以响应一部分覆盖范围内的周围单元,对于大型图像处理有出色表现。
卷积神经网络由一个或多个卷积计算层和顶端的全连接层(经典神经网络)组成,同时也包括关联权重和池化层。这一结构是的卷积神经网络能够利用输入数据的二维结构。与其他神经网络结构相比,卷积神经网络在图像和语音识别方面能够给出更优的结果。相比较其他深度、前馈神经网络,卷积神经网络需要估计的参数更少,从而使之成为一种颇具吸引力的深度学习框架。
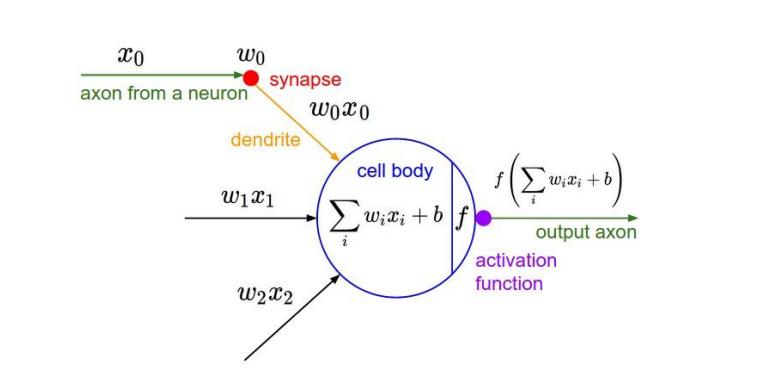
我们前面所接触到的神经网络的结构是这样的:
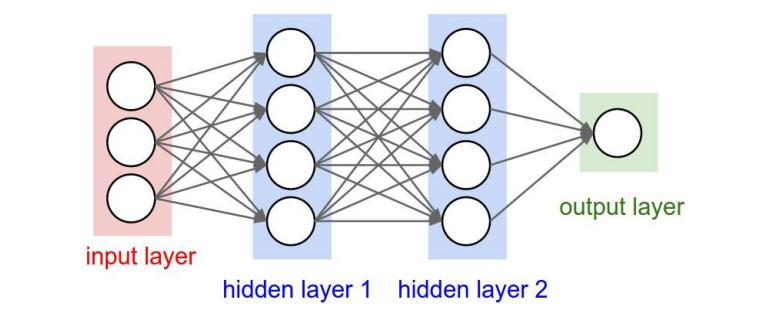
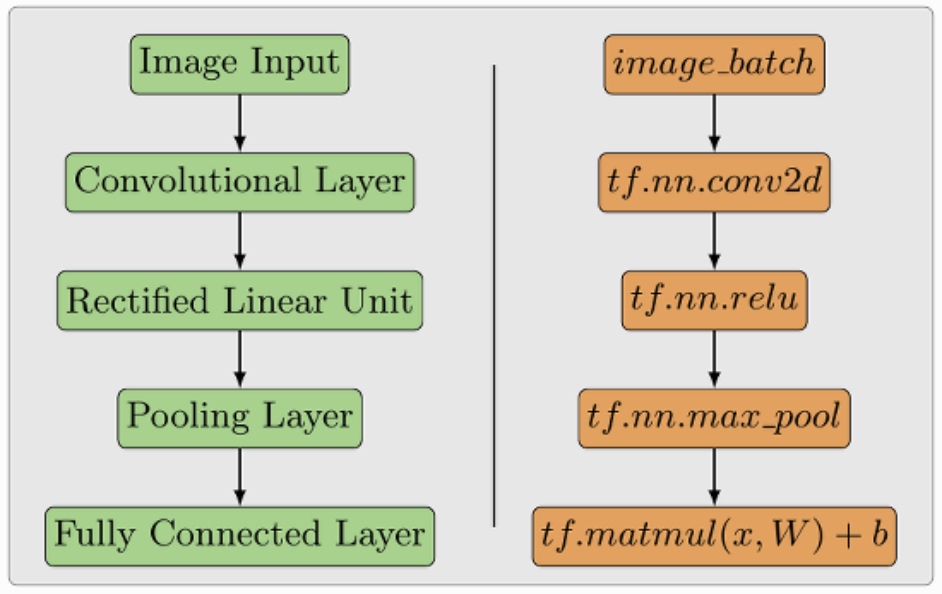
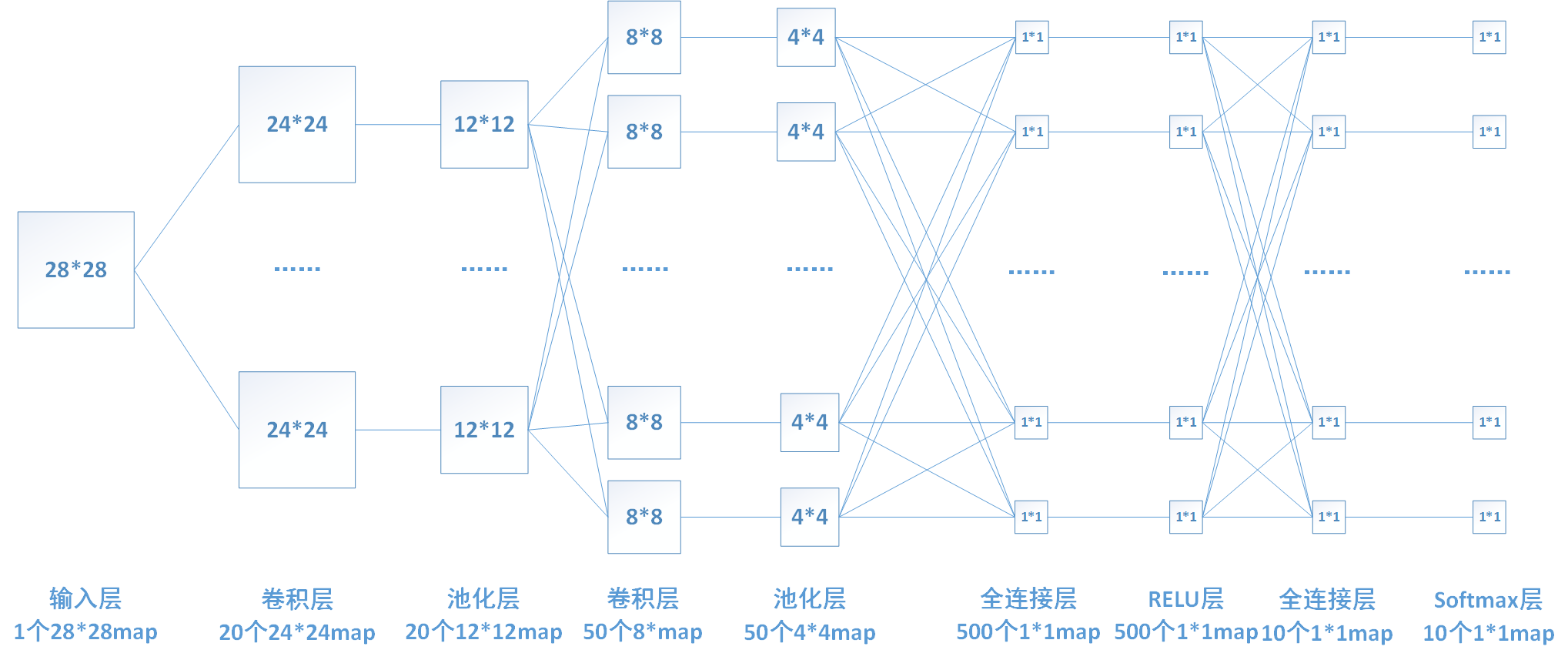
卷积神经网络依旧是层级网络,只是层的功能和形式做了变化,也可以是传统神经网络的一个改进,不同的层次有不同运算与功能,如下图中就多了很多传统神经网络中所没有的层次。
卷积神经网络的核心思想
局部感受野:普通的多层感知器中,隐层节点会全连接到一个图像的每个像素点上;而在卷积神经网络中,每个隐层的节点只连接到图像某个足够小的像素点上,从而大大减少需要训练的权重参数。权值共享:在卷积神经网中,同一个卷积核内,所有的神经元的权值是相同的,从而大大减少需要训练的参数。池化:在卷积神经网络中,没有必要一定就要对原图像做处理,而是可以使用某种“压缩”方法,这就是池化,也就是每次将原图像卷积后,都通过一个下采样的过程,来减小图像的规模。
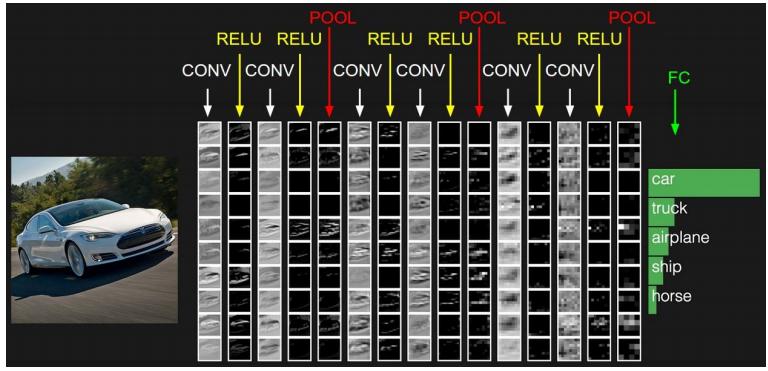
卷积神经网络的层级结构
数据输入层(Input layer)
任务:主要是对原始图像进行预处理
举个栗子:
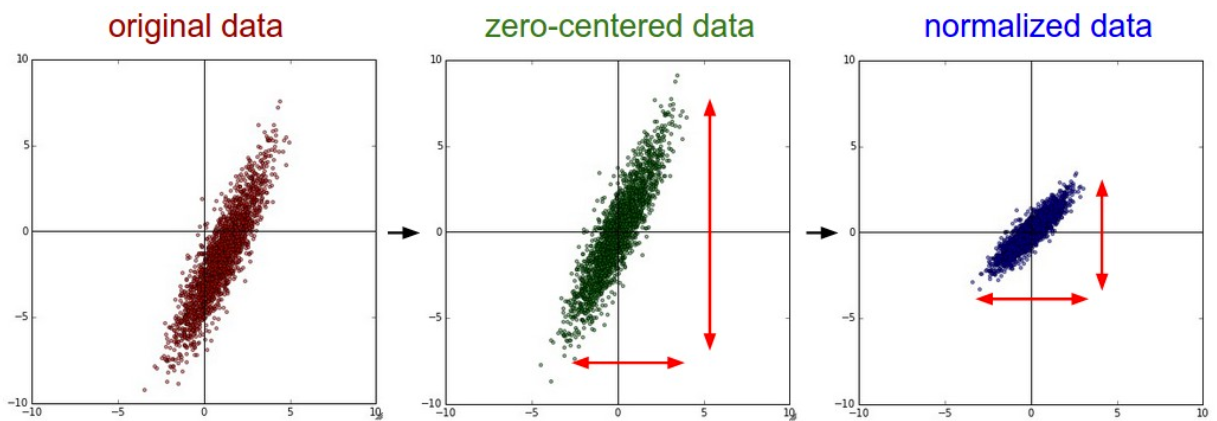
去均值与归一化
去均值的目的在于把样本的中心拉回到坐标系原点上;归一化的目的就是减少各维度数据取值范围的差异而带来的干扰。比如,我们有两个维度的特征A和B,A范围是0到10,而B范围是0到10000,如果直接使用这两个特征是有问题的,好的做法就是归一化,即A和B的数据都变为0到1的范围。
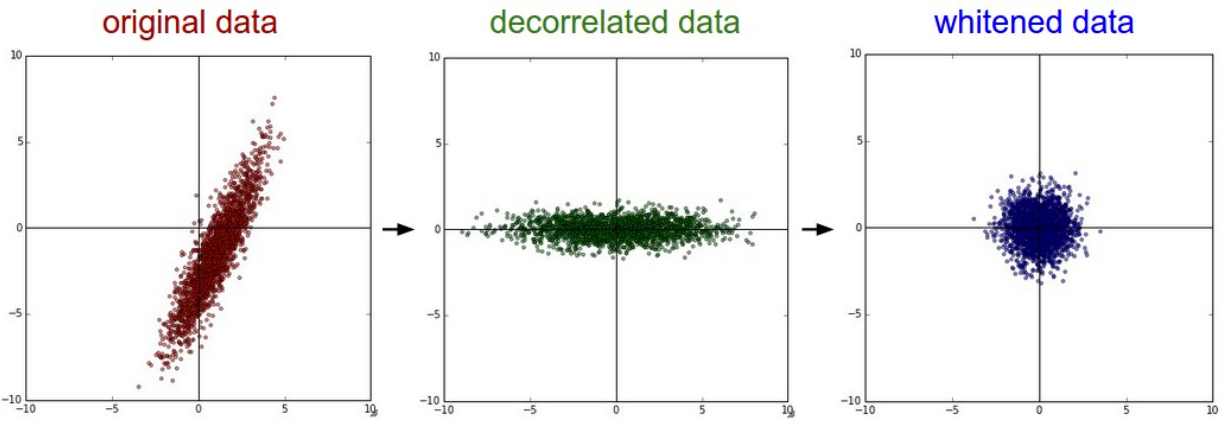
去相关与白化
卷积计算层(CONV layer)
任务:对输入的图像进行特征提取
卷积计算层是卷积神经网络中最重要的一个层次,也是“卷积神经网络”的名字来源。
举个栗子:
假设一张图像有 5x5 个像素,1 代表白,0 代表黑,这幅图像被视为 5x5 的单色图像。现在用一个由随机地 0 和 1 组成的 3x3 矩阵去和图像中的子区域做Hadamard乘积,每次迭代移动一个像素,这样该乘法会得到一个新的 3x3 的矩阵。下面的动图展示了这个过程。
直观上来理解:
- 用一个小的权重矩阵去覆盖输入数据,对应位置元素加权相乘,其和作为结果的一个像素点。
- 这个权重在输入数据上滑动,形成一张新的矩阵
- 这个权重矩阵就被称为
卷积核(convolution kernel) - 其覆盖的位置称为
感受野(receptive fileld ) - 生成的新矩阵叫做
特征图(feature map)
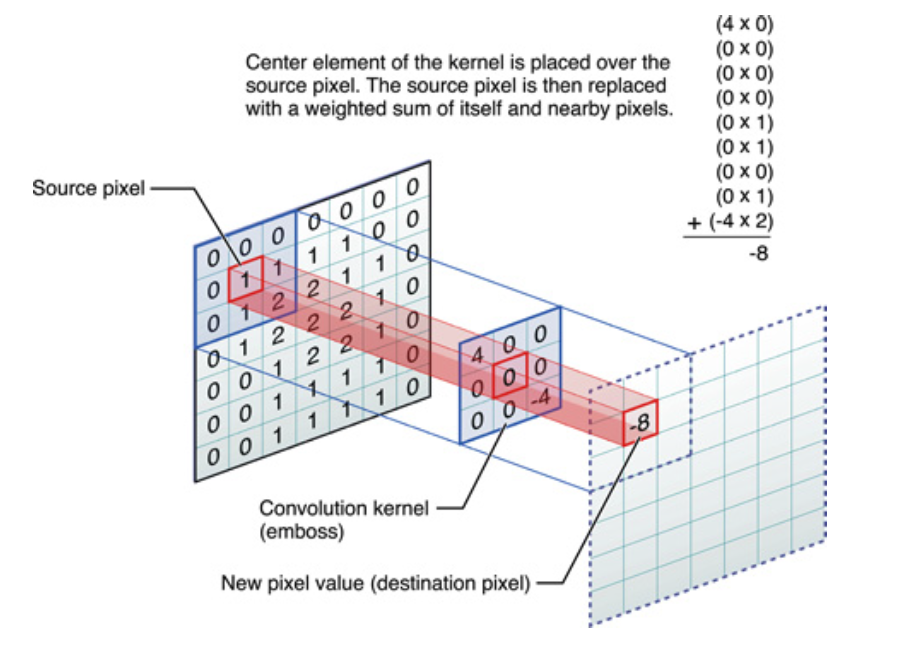
分解开来,就如下图所示:
其中:
滑动的像素数量就叫做
步长(stride),步长为1,表示跳过1个像素,步长为2,就表示跳过2个像素,以此类推
以卷积核的边还是中心点作为开始/结束的依据,决定了卷积的
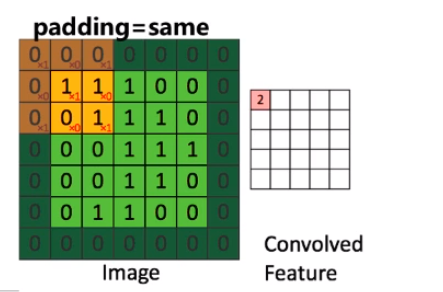
补齐(padding)方式。前面我们所举的栗子是valid方式,而same方式则会在图像的边缘用0补齐,如将前面的valid改为same方式,如图所示:
其采样方式对应变换为:
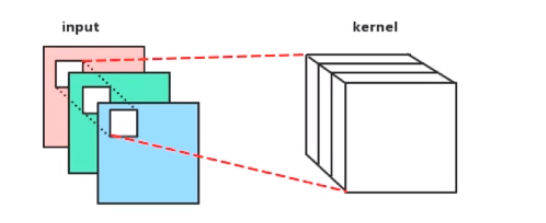
- 我们前面所提到的输入图像都是灰色的,只有一个通道,但是我们一般会遇到输入通道不只有一个,那么卷积核是三阶的,也就是说所有的通道的结果做累加。
当然,最后,这里有一个术语:“偏置(bias)”,每个输出滤波器都有一个偏置项,偏置被添加到输出通道产生最终输出通道。
再举个栗子:
下面蓝色矩阵周围有一圈灰色的框,那些就是上面所说到的填充值 (padding=same)的方式。这里的蓝色矩阵就是输入的图像,粉色矩阵就是卷积层的神经元,这里表示了有两个神经元(w0,w1)。绿色矩阵就是经过卷积运算后的输出矩阵,这里的步长设置为2。
ReLU激活层(ReLU layer)
任务:卷积后的结果压缩到某一个固定的范围做非线性映射,这样可以一直保持一层一层下去的数值范围是可控的。
激活函数:
SigmoidTanh(双曲正切)ReLULeaky ReLUELUMaxout
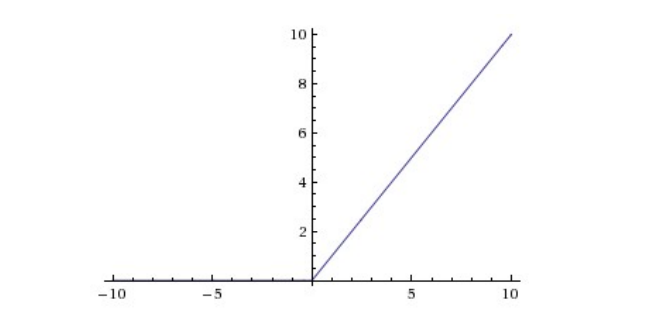
卷积神经网络一般采用的激活函数是ReLU(The Rectified Linear Unit/修正线性单元),它的特点是收敛快,求梯度简单,但较脆弱,图像如下:
激励层的实践经验:
- 不要用sigmoid!不要用sigmoid!不要用sigmoid!
- 首先试RELU,因为快,但要小心点 、
- 如果2失效,请用Leaky ReLU或者Maxout
- 某些情况下tanh倒是有不错的结果,但是很少
池化层(POOling layer)
任务:对特征进行采样,即用一个数值替代一块区域,主要是为了降低网络训练参数及模型的过拟合程度。
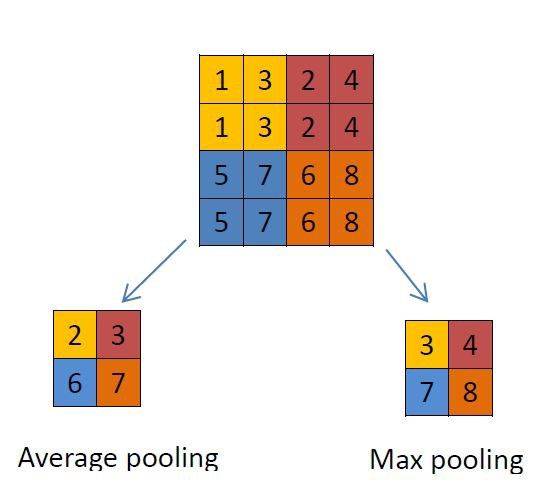
通过卷积层获得了图像的特征之后,理论上我们可以直接使用这些特征训练分类器(如softmax),但是这样做将面临巨大的计算量的挑战,而且容易产生过拟合的现象。为了进一步降低网络训练参数及模型的过拟合程度,对卷积层进行池化/采样(Pooling)处理。池化/采样的方式通常有以下两种:
- 最大池化(Max Pooling: 选择Pooling窗口中的最大值作为采样值;
- 均值池化(Mean Pooling): 将Pooling窗口中的所有值相加取平均,以平均值作为采样值
- 高斯池化:借鉴高斯模糊的方法。不常用。
- 可训练池化:使用一个训练函数$y=f(x)$。不常用。
主要使用不同的函数为输入降维。通常,最大池化层(max-pooling layer)出现在卷积层之后。池化层使用 2*2 的矩阵,以卷积层相同的方式处理图像,不过它是给图像本身降维。下面分别是使用「最大池化」和「平均池化」的示例。
图像经过池化后,得到的是一系列的特征图,而多层感知器接受的输入是一个向量。因此需要将这些特征图中的像素依次取出,排列成一个向量(这个过程被称为光栅化)。
全连接层(FC layer)
任务:全连接层的每一个结点都与上一层的所有结点相连,用来把前边提取到的特征综合起来。由于其全相连的特性,一般全连接层的参数也是最多的。主要是为了分类或回归,当然也可以没有。
其原理和我们前面所推导的DNN是一样的。
两层之间的所有神经元都有权重连接,通常全连接层在卷积神经网络的尾部。
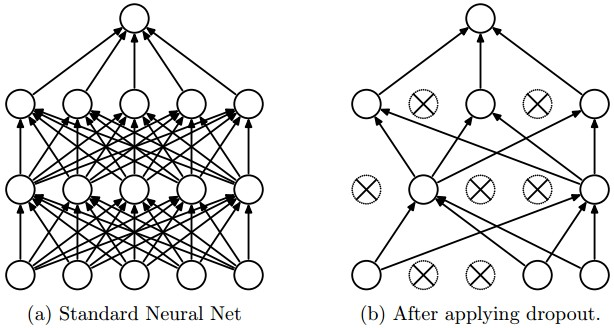
Dropout层(Dropout layer)
任务:在模型训练时随机让网络某些隐含层节点的权重不工作,不工作的那些节点可以暂时认为不是网络结构的一部分,但是它的权重得保留下来(只是暂时不更新而已),因为下次样本输入时它可能又得工作了。主要是为了防止过拟合。
上图a是标准的一个全连接的神经网络,b是对a应用了dropout的结果,它会以一定的概率(dropout probability)随机的丢弃掉一些神经元。
卷积神经网络之优缺点
优点
- 共享卷积核,对高维数据处理无压力
- 无需手动选取特征,训练好权重,即得特征分类效果好
缺点
- 需要调参,需要大样本量,训练最好要GPU
- 物理含义不明确(也就说,我们并不知道每个卷积层到底提取到的是什么特征,而且神经网络本身就是一种难以解释的“黑箱模型”)
卷积神经网络之典型CNN
LeNet,这是最早用于数字识别的CNNAlexNet, 2012 ILSVRC比赛远超第2名的CNN,比 LeNet更深,用多层小卷积层叠加替换单大卷积层。ZF Net, 2013 ILSVRC比赛冠军GoogLeNet, 2014 ILSVRC比赛冠军VGGNet, 2014 ILSVRC比赛中的模型,图像识别略差于GoogLeNet,但是在很多图像转化学习问题(比如object detection)上效果奇好
卷积神经网络的常用框架
Caffe
Torch
TensorFlow
本博客所有文章除特别声明外,均采用 CC BY-SA 3.0协议 。转载请注明出处!